The Lab · Robotics
Drono Robotics: the Titan rover.
A 3D-printed rover platform built to learn autonomous sensing the hard way: SLA and FDM printed chassis parts, LiDAR and radar experiments, and a lot of reprints.
- Role
- Design, print, wire, debug
- Type
- Self-initiated robotics build
- Hardware
- Titan chassis, LiDAR, radar
- Status
- Superseded by TRLC-DK1
01Overview
Overview
This project explored how autonomous UAVs could be used for humanitarian search and rescue in the aftermath of disasters. The goal was to create a system that could detect trapped or injured people faster than traditional rescue methods, using radar and AI to reduce reliance on manual piloting. UWB Radar/GPR Radars would be used to detect human heartbeats/respiration under rubble.
02Objectives
Objectives
- Develop an autonomous aerial platform capable of detecting human presence beneath rubble.
- Explore low-cost alternatives to existing rescue drones (targeting <$4,000 per unit vs. ~$100,000 for existing systems).
- Integrate advanced radar (24 GHz and 77 GHz arrays) with onboard computing to enable autonomous navigation and victim detection.
03Research & development
Research & development
We began with system-level studies of radar parameters, detection ranges, and antenna designs.
From this, we progressed through several stages:
Prototyping propulsion and airframes
Atlas range of UAVs, from small units to the heavy-lifting Atlas Titan.


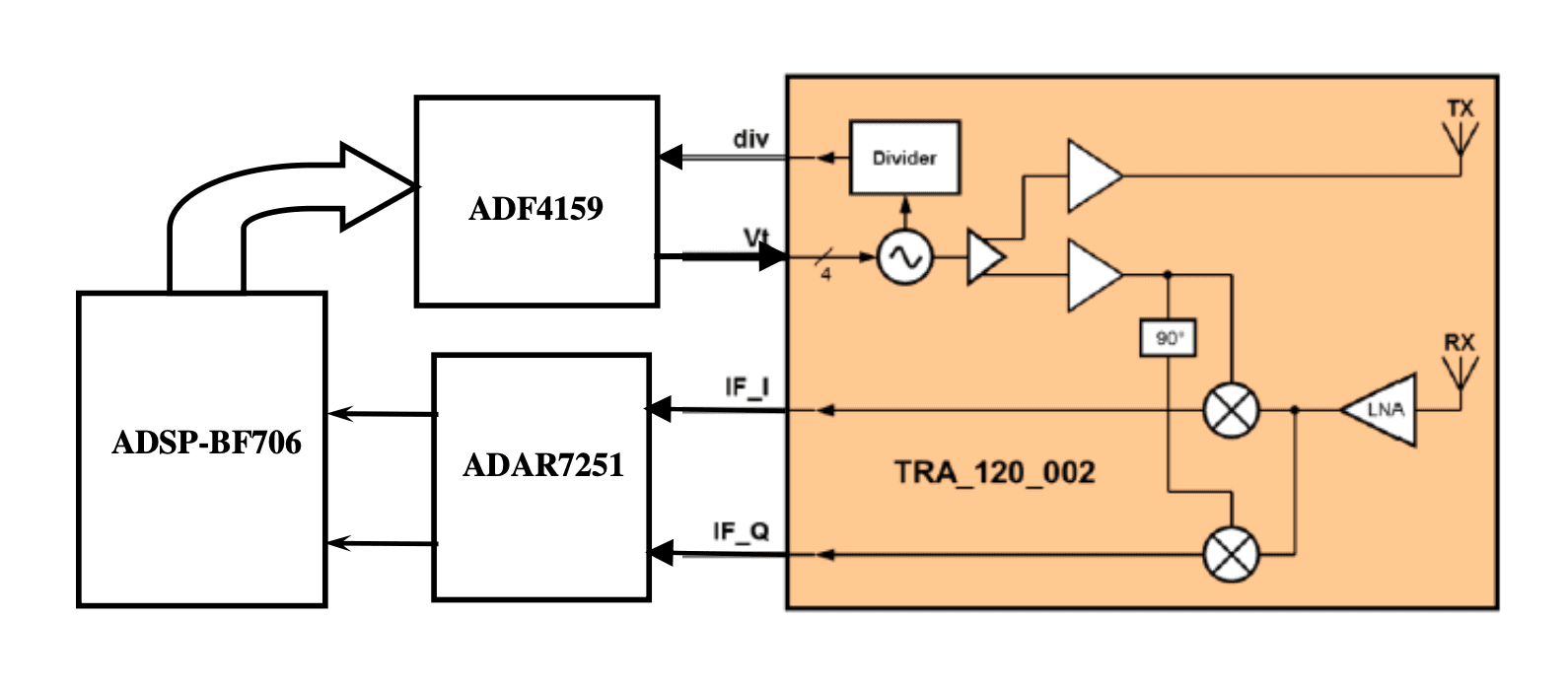
Radar subsystem design
Including detailed antenna array development at 24 GHz (forward looking) and 77 GHz (side looking). These were modelled, simulated, and optimised using tools such as CST Microwave Studio, HFSS, and IE3D.
Autonomy and control systems
With sensor fusion from radar, LiDAR and encoders. We developed avoidance algorithms and PID-based motor control for stable autonomous flight. We also developed a custom program to process LiDAR data into a 3D point cloud.
04Approach to testing
Approach to testing
- Bench tests of antenna performance (bandwidth, gain, beamwidth, side-lobe levels).
- 3D-printed and carbon-fibre prototyped airframe components for Titan.
- Integration of LiDAR, radar and encoder data in C++ for obstacle avoidance.
- Early flight prototypes validated the ability to autonomously map environments and detect objects, though long-range endurance and ruggedisation remained challenges.
05What worked
What worked
- Successfully demonstrated radar-based heartbeat and presence detection in controlled conditions.
- Autonomous navigation through sensor fusion showed promising stability.
- Prototyped hardware at significantly reduced cost compared to industry standards.
Production process




06What didn't fully work
What didn't fully work
- Range and endurance limitations: maintaining long flights with heavy payloads proved challenging.
- The antenna beamwidths could not always meet desired coverage (patch arrays typically limited to ~70° rather than 90°).
- Field validation in real disaster-like environments remained a future step.
07Impact & next steps
Impact & next steps
The project proved that combining low-cost UAV hardware, advanced millimetric radar, and autonomous control software could create a powerful platform for humanitarian rescue and military reconnaissance.
